Flashing firmware
The guide here says this is how to enter DFU mode.
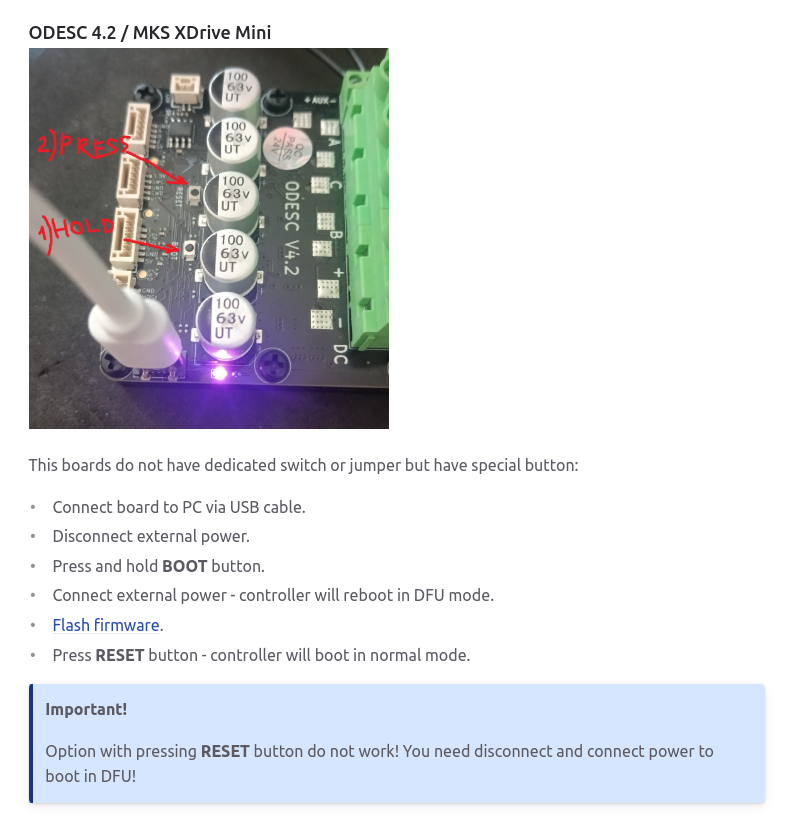
If it is, it doesn’t seem to work with this board. I ordered an ST-link V2 and was able to program the official firmware with this command:
openocd -f interface/stlink.cfg -f target/stm32f4x.cfg -c "program ODriveFirmware_v3.6-24V_0.5.6.elf verify reset exit"
USB control latency
Measuring the control latency with Grok by setting a command velocity and then polling the encoder until the position changes:
Code
import odrive from odrive.enums import * import time import numpy as np # Connect to ODESC odrv0 = odrive.find_any() if odrv0 is None: raise Exception("No ODESC found!") # Configure for velocity control odrv0.axis0.controller.config.control_mode = CONTROL_MODE_VELOCITY_CONTROL odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL # Encoder setup (16k PPR = 4000 pulses/rev x 4 for quadrature) counts_per_rev = 16000 # 16k PPR confirmed vel_command = 100.0 # 1 rev/s velocity command # Store latency measurements latencies = [] print("Starting 100 trials...") for trial in range(100): # 1) Poll position for a bit to establish baseline initial_positions = [] for _ in range(100): # Poll 100 times to ensure stability initial_positions.append(odrv0.axis0.encoder.shadow_count) # Check if motor is stopped (velocity ~0) while True: pos1 = odrv0.axis0.encoder.shadow_count time.sleep(0.001) # Minimal delay to measure velocity pos2 = odrv0.axis0.encoder.shadow_count vel = (pos2 - pos1) * 1000 / counts_per_rev # rev/s if abs(vel) < 0.01: # Stopped if < 0.01 rev/s break initial_pos = odrv0.axis0.encoder.shadow_count # 2) Set velocity command and record start time start_time = time.time() odrv0.axis0.controller.input_vel = vel_command # 3) Poll position until it changes while True: current_pos = odrv0.axis0.encoder.shadow_count if abs(current_pos - initial_pos) > 10: # Moved >10 counts (~0.002 rev) break_time = time.time() break # Record latency latency = (break_time - start_time) * 1000 # Convert to ms latencies.append(latency) # 4) Stop the motor odrv0.axis0.controller.input_vel = 0 # Wait until stopped while True: pos1 = odrv0.axis0.encoder.shadow_count time.sleep(0.001) # Minimal delay for velocity calc pos2 = odrv0.axis0.encoder.shadow_count vel = (pos2 - pos1) * 1000 / counts_per_rev # rev/s if abs(vel) < 0.01: # Stopped if < 0.01 rev/s break # 5) Calculate mean and stddev mean_latency = np.mean(latencies) stddev_latency = np.std(latencies) # Stop motor and cleanup odrv0.axis0.requested_state = AXIS_STATE_IDLE print(f"Completed 100 trials") print(f"Mean latency from command to motion: {mean_latency:.2f} ms") print(f"Standard deviation: {stddev_latency:.2f} ms") # matplotlib histogram of latencies: import matplotlib.pyplot as plt plt.hist(latencies, bins=20) plt.title("Latency Histogram") plt.xlabel("Latency (ms)") plt.ylabel("Frequency") plt.show()
I get this:
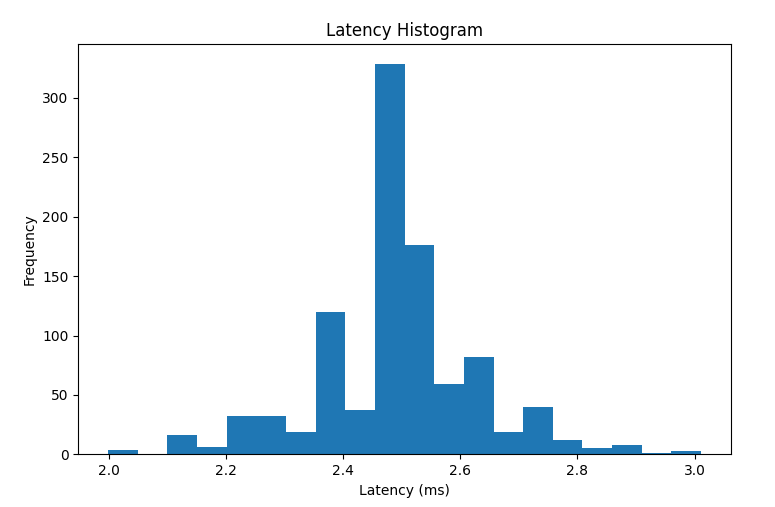
Not bad. I don’t think a USB connection could really get much faster.